For decades, engineers have taught machines to move like humans, but not to think as quickly. Path planning, the process by which a robot determines the safest and most efficient route from one point to another, remains one of the defining challenges in robotics. From warehouse automation to self-driving cars, every robot must make fast, obstacle-free decisions in complex environments.
Now, Prof. Souhail Dhouib from the University of Sfax (Tunisia), has unveiled an artificial intelligence method that could change how robots navigate. His approach, known as the Dhouib Matrix-Shortest Path Problem (DM-SPP) method, promises to compute optimal routes in a fraction of the time required by traditional algorithms.
Published in Results in Control and Optimization and Cognitive Robotics, Prof. Dhouib’s studies, “Shortest path planning via the rapid Dhouib-Matrix-SPP (DM-SPP) method for the autonomous mobile robot” and “Intelligent path planning for cognitive mobile robot based on Dhouib-Matrix-SPP method” show that the technique can outperform established artificial intelligence (AI) systems like A*, Dijkstra, Genetic Algorithm, and Ant Colony Optimisation by enormous margins.
Reinventing the path to intelligence
Every autonomous robot faces the same fundamental problem: how to reach a target while avoiding collisions and minimising distance and time. This shortest path planning problem lies at the heart of robotics, logistics, drone navigation, and planetary exploration.
Traditional AI methods, such as A* and Dijkstra’s algorithm, rely on iterative searches that examine vast numbers of possible routes before choosing one. Others, like Particle Swarm Optimisation (PSO) or Ant Colony Optimisation (ACO), imitate biological behaviour but suffer from slow convergence.
The DM-SPP method takes a different route. Instead of iteratively guessing and refining, DM-SPP constructs an optimised path in a single deterministic sweep using a mathematical matrix. In essence, it analyses the network of available paths as a contingency matrix, calculates the cumulative and path costs, and determines the most efficient route from start to goal.
In doing so, DM-SPP transforms the maze-like navigation challenge into a simple matrix traversal problem, enabling robots to make their movement decisions far more quickly than probabilistic algorithms can manage.
The science behind DM-SPP
The DM-SPP is part of a broader optimisation framework called Dhouib-Matrix (DM), a concept developed by Prof. to solve complex combinatorial problems in operations research. Within this framework, multiple algorithms address specific mathematical challenges, including the Travelling Salesman Problem (TSP) and Minimum Spanning Tree Problem (MSTP).
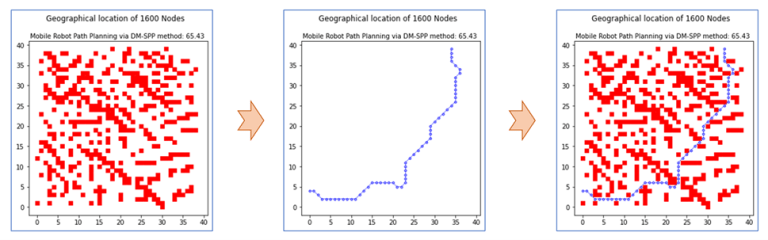
In the case of DM-SPP, the method transforms the robot’s physical environment into a grid model then to a graph where each node represents a location and each edge a possible movement. The grid is divided into free cells and obstacle cells, which the robot must avoid (see Figure 1). Movement is permitted in eight directions: up, down, left, right, and the four diagonals. The algorithm uses Euclidean distance to calculate each step.
Unlike heuristic or stochastic algorithms that rely on repeated iterations to approach a solution, DM-SPP guarantees an optimal solution in one computation. Its time complexity scales linearly, expressed as O(n), where n is the number of empty squares in the grid map. For larger and more complex maps, especially those with numerous obstacles, the method actually becomes faster because fewer connections need to be considered.
This mathematical elegance provides DM-SPP with a significant computational advantage, enabling it to compute routes in milliseconds, even for dense maps containing thousands of potential paths.
Tested against the world’s best
To verify its performance, Prof. Dhouib implemented the DM-SPP algorithm in Python using the Matplotlib library for visualisation. He tested the method on various grid environments from small 20×20 maps to larger 40×40 environments containing up to 1600 nodes and compared its performance to twelve state-of-the-art AI techniques, including PSO, GA, and ACO.
The findings were remarkable. In experiments published in Results in Control and Optimization (2023), DM-SPP produced shorter paths with significantly lower computational time than every tested algorithm. It achieved up to 861% faster performance than the Genetic Algorithm, over 5,000% faster than Ant Colony Optimization, and found the exact optimal route (in an environment represented by a grid map), while others delivered approximate results after hundreds of iterations.
Further tests in Cognitive Robotics (2024) demonstrated that DM-SPP was, on average, 60 times faster than improved versions of A* and Ant Colony systems. In certain environments, such as the 40×40 grid models with multiple obstacles, DM-SPP’s computational speed exceeded that of traditional algorithms by more than 80 times, while improving the precision of path length by 5–14%.
These experiments confirm DM-SPP as the fastest artificial intelligence method for the Mobile Robot Path Planning Problem with grid-map representation of the environment, offering a combination of speed, determinism, and accuracy.
From simulation to real-world robots
Although these studies were performed in virtual environments, the implications for real-world robotics are substantial. Robots in manufacturing plants, automated warehouses, and delivery systems often depend on real-time decisions to avoid collisions or delays. In autonomous vehicles and drones, milliseconds can determine safety and efficiency.
Because DM-SPP’s computational structure is lightweight, it can be embedded in low-power hardware systems. This efficiency could reduce the energy consumption of navigation modules, extend battery life, and enhance response time for robots operating in uncertain environments.
Prof. Dhouib’s results suggest that even when the robot faces highly cluttered terrains, DM-SPP’s matrix-based logic allows it to reason faster, a feature that could benefit emergency response robots navigating disaster zones or planetary rovers exploring rugged surfaces.
A step towards cognitive autonomy
The concept of a cognitive mobile robot extends beyond movement. It involves decision-making, perception, and adaptation abilities that blur the line between automated control and artificial cognition. By significantly enhancing how robots plan and act, DM-SPP contributes to the growing field of cognitive robotics, where the goal is to enable machines to think with purpose rather than react with repetition.
The research published in Cognitive Robotics (2024) explicitly situates DM-SPP within this cognitive framework. The algorithm not only plans routes but does so in a manner that resembles reasoning: it processes environmental data, eliminates redundancies, and determines the shortest and safest route with remarkable efficiency.
This behaviour aligns with the notion of robots that can interpret spatial data and autonomously plan their paths, an essential capability for the next generation of intelligent machines.
Looking ahead
In both papers, Prof. Dhouib outlines his vision for the method’s future. He proposes expanding DM-SPP to support multi-robot systems, enabling fleets of autonomous machines to coordinate paths without collision. He also suggests testing DM-SPP in three-dimensional environments, where aerial drones or underwater vehicles must navigate through multiple planes rather than flat surfaces.
Further improvements may focus on path smoothing, refining the robot’s trajectory to mimic natural human or animal movement. Prof. Dhouib also anticipates integrating DM-SPP with other artificial intelligence frameworks, such as the Artificial Bee Colony algorithm or Particle Swarm Optimisation, to enhance adaptability in dynamic or unknown environments.
At its core, this research addresses one of the biggest bottlenecks in robotics: computational speed. While robots can already perceive their surroundings through advanced sensors and cameras, their ability to process this information and act remains limited by the efficiency of their algorithms.
References
Dhouib, S. (2024). Intelligent path planning for cognitive mobile robot based on Dhouib-Matrix-SPP method. Cognitive Robotics, 4, 62–73. https://doi.org/10.1016/j.cogr.2024.02.001
Dhouib, S. (2023). Shortest path planning via the rapid Dhouib-Matrix-SPP (DM-SPP) method for the autonomous mobile robot. Results in Control and Optimization, 13, 100299. https://doi.org/10.1016/j.rico.2023.100299